RAW域噪声模型
RAW域噪声模型
噪声模型资料整理主要来源于论文:
2018 Practical Deep Raw Image Denoising on Mobile Devices
Sensor 光电转换 pipeline
ISO-dependent noise model of camera sensor
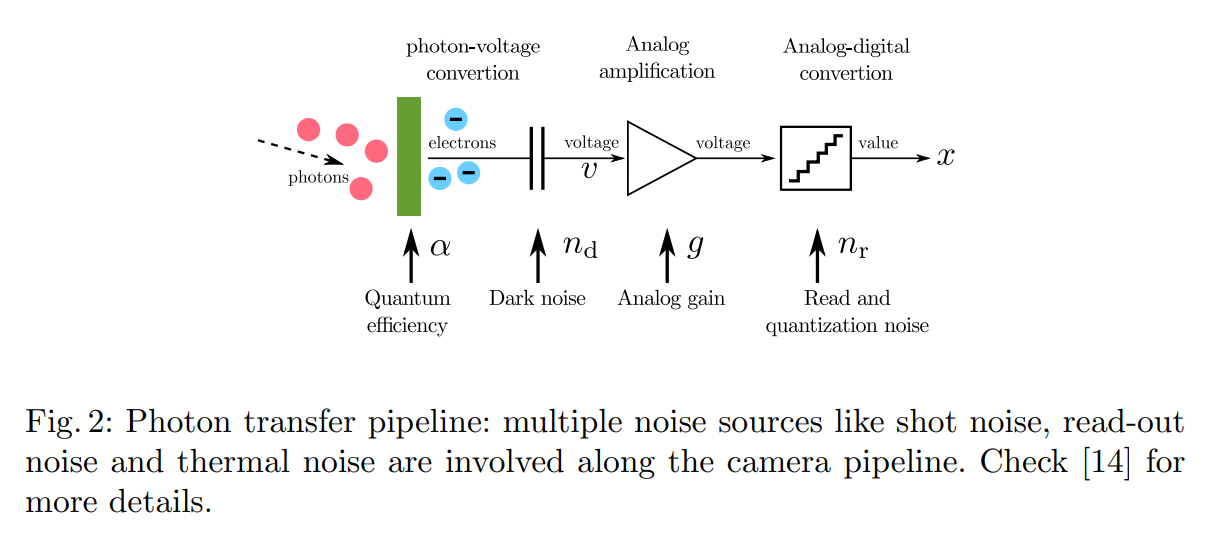
- 光电转换
Quantum efficiency: 量子效率 α:在光电过程中释放的光电子数与吸收的辐射量子数之比,即光电转换效率
Ø 散粒噪声(Shot Noise): 光子是离散的,在单个CMOS传感器的感应面积上,到达的光子数相比于期望值会有随机的涨落,由此产生的噪声,称为散粒噪声。(泊松噪声)
比如光比较弱, 那么某个极短时间,击落到sensor上的概率p就比较小,如果光比较强,则p就比较大。 某个时间内比如等于n个极短时间,就是np=λ的概率, 符合泊松概率分布
- 模拟放大
Dark noise: 暗噪声 nd, 服从高斯分布(零和噪声)
Ø 暗噪声(Dark Noise):由暗电流产生的噪声,称为暗噪声。
Analog gain:模拟增益 g
- 模数转换ADC
Read and quantization noise: 读出和量化噪声 nr,服从高斯分布(零和噪声)
读出噪声(Read Noise):读出电路得到DN值(digital number)的过程中,一些电路固有的因素,如器件中的电子的热运动等,会造成结果的不精确。该过程产生的误差称为读出噪声(高斯分布)
噪声模型
读出噪声来自于传感器读出电路,由读出电路及像素内部的放大器决定,满足高斯分布。高斯噪声的主要影响因素是温度,因为温度会影响电子电路的期间参数。由于高斯噪声与图像亮度无关,因此,同样是在低亮度下,信噪比相对更低,高斯噪声更加突出。读出电路读出口速度越快,读出噪声越大。读出噪声低能够提高图像的动态范围,提高图像的对比度。在弱光高速成像中,低读出噪声对检测非常微弱的信号至关重要。
从光子到数字化亮度图,每一个转换阶段都会引入噪声(红色标记)。对于一个线性的camera model(即和光亮成正比的sensor),每一个像素点,sensor的conversion 是线性放大的(这是测量朴素约束的),即:
u是击中pixel area的光子数,模拟增益 g,x是sensor读出值,假定在每一步有引入随机加性噪声:
gn_d+n_r 构成了零和高斯噪声 :
这里的u是一个随机变量,由于到达传感器的光子数目是具有一定随机性的,这一变量服从于泊松分布。 假定一个光子击中传感器的概率是p,那么这是一个n次伯努利实验. 传感器很小,因此p足够小,光子由足够多,因此n足够大。 因此u服从泊松分布。 泊松分布公式
由于泊松分布的 期望E 和方差D 都是 λ, 假设u是该时间内接受到的期望光子数λ(λ=u), 于是可以写为:
由 x=gαu 得 u=x/gα . 于是 有: x*是读出值的期望
最后我们可以得到传感器读出得x得噪声模型(随机模型):
这就是泊松高斯噪声模型,为简化公式 令 k=gα,那么有 x=ku,还有:
接下来就来估计 这个读出x 的期望E和方差D, 已知 可求:
根据方差性质
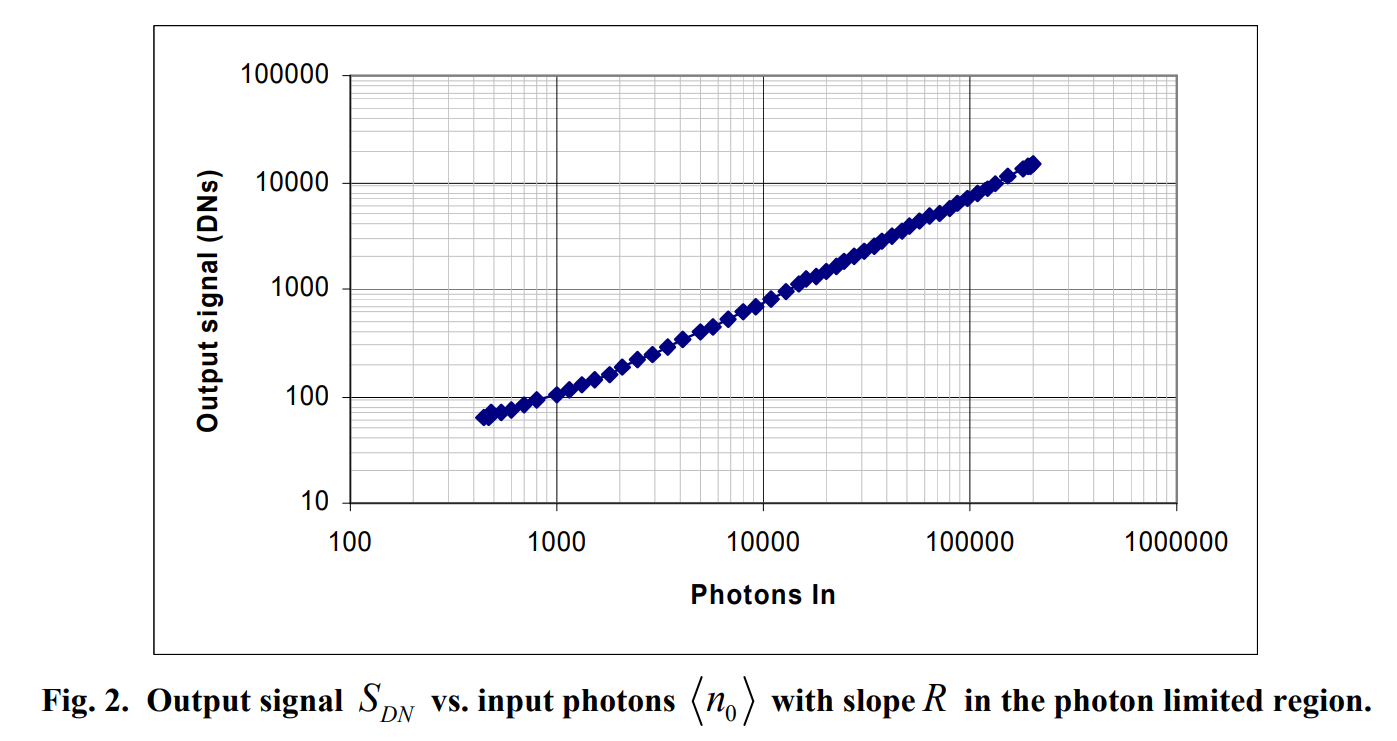
D(x)公式表示,在某一个特定 ISO ,特定曝光,特定器件下, 噪声和像素值具有线性关系:
这里的方差就是读出变量的随机性,即噪声, 可以看到这是一个乘性和加性的噪声
- 若变量
, 那么 - 若变量
,那么 aX 并不服从泊松分布,即不满足 ,因为它的期望是 ,方差是 ,很明显不符合泊松分布,但是满足
再看
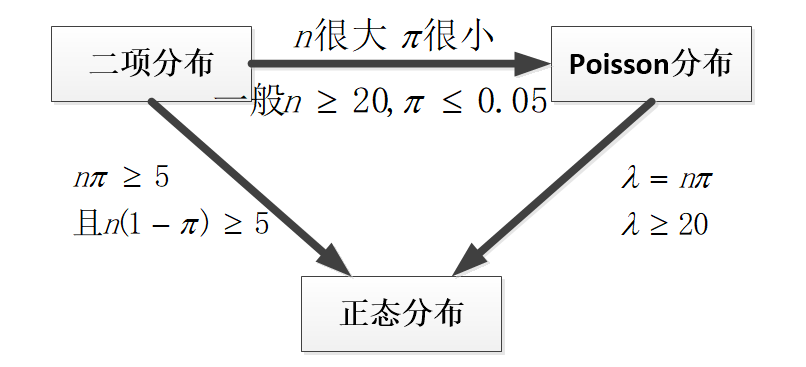
假若光子数>20,可以近似为正态分布
. 目前没有找到手机sensor的说明书里一倍gain下1DN对应的光子数需要多少,参考下面这个材料,大约是10个光子,2DN是20个, 也约摸可以这样近似
噪声模型的影响因素
iso和gain值相关, gain/256*50=iso, 即增益越大.k越大,噪声越大
因此通常选择用一个低iso的图像作为一个比较好的GT(此时噪声比较小)
当训练一个去噪网络时需要考虑不同的噪声模型,即覆盖不同范围的ISO
去噪的核心是噪声细节平衡,如果用高ISO的数据训练,低ISO推理,细节可能都抹没了;所以要分多个ISO段,分开来训练。一个模型无法覆盖所有ISO段,所以分段处理
如何检测噪声:
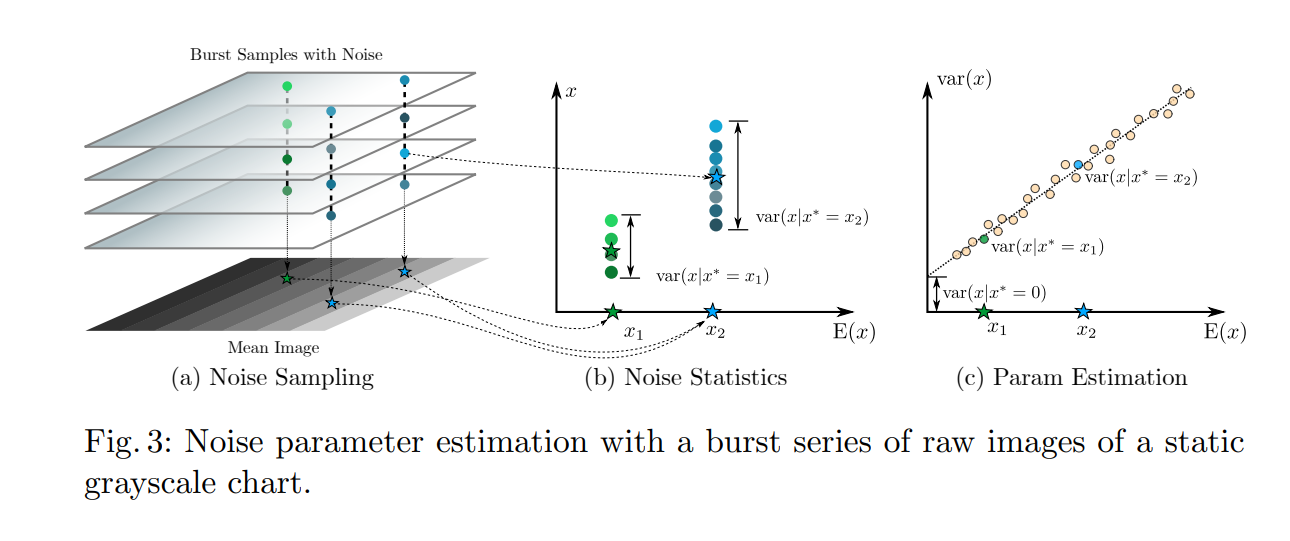
一次拍下同一个场景多张图片,
将多张图片平均,可以认为是这个是这个点的期望值x*, 即真值, 就可以作为上面的横坐标轴
每个横坐标点的E(x) 的单图原始数据打到y坐标,构成了图b
每个E(x)点的 多个散点的的方差,就是前面的
对这个 Ex ~ Varx 曲线拟合, 求得 K和B,就可以得到 特定曝光,特定器件下, 噪声和像素值具有线性公式
性质
- 随着iso增大, 斜率k 和截距b都会增加, k和iso的线性关系更好,截距b类似幂/指数关系
- 数据量越多,得到的结果越平滑,即多帧的统计结果更平滑,其中单帧和多帧计算斜率k差距不大,而单帧和多帧计算b差别较大
- 考虑到像素值过大,可能器件的线性能力会变差. 因此只截取极暗区域进行拟合,斜率k于iso的线性关系会更强,截距与iso的关系也会更平衡
K 和B随ISO的拟合关系:
- K为三阶拟合: K(ISO)=
- B为二阶拟合: B(ISO)=
Question:
- RGGB 不同通道的 标定参数不是不一样吗?
- HCG LCG 的iso k b参数一样吗?
- 曝光值影响iso曲线吗
